Deep learning in time-lapse processing (Alali et al., 2020)
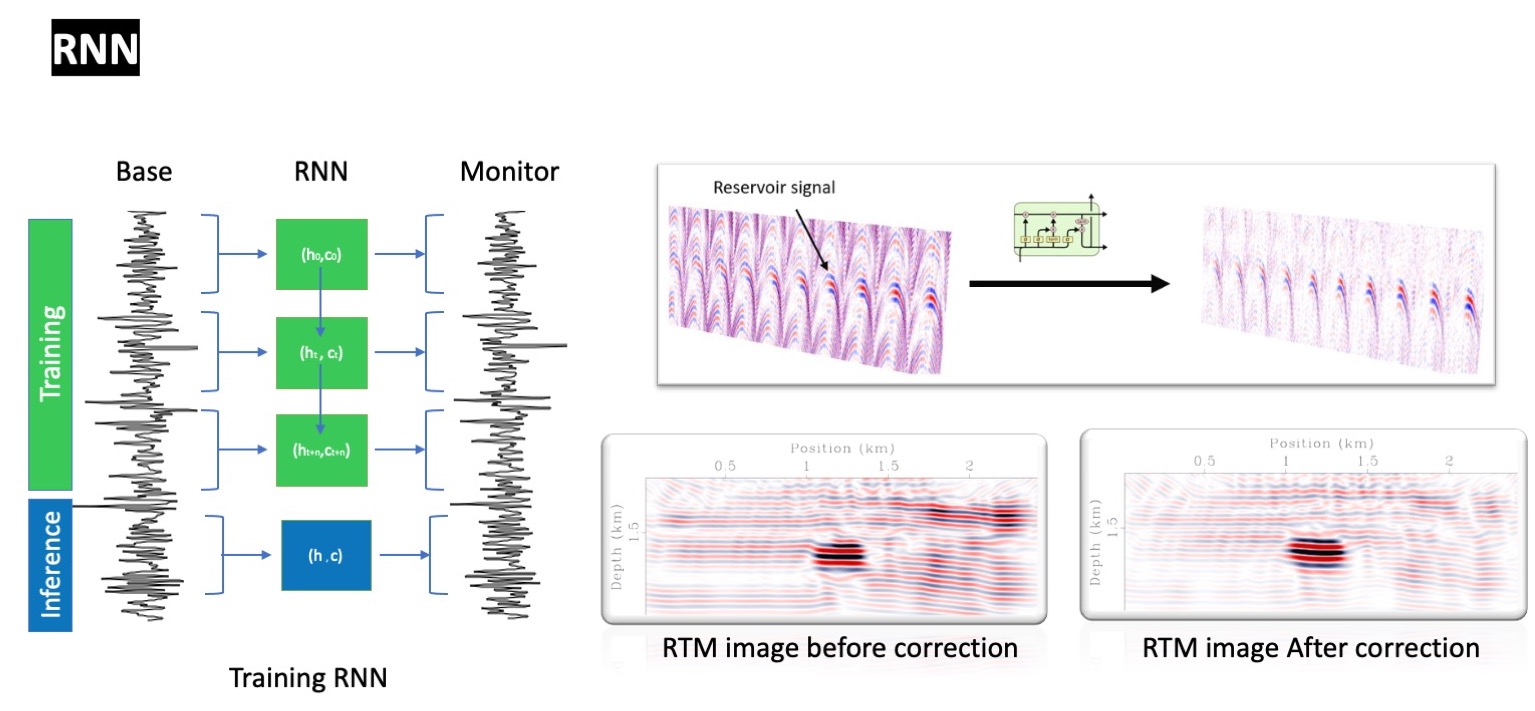
Here, we test two deep learning (DL) models to implement the matching between the base and the monitor. Similar to the conventional XEQ, we propose to train the DL models on short shallow windows that do not contain the target signal and then we infer to the deeper parts. This allows the network to learn the static variation needed to match the surveys while preserving the reservoir signal.
DL models
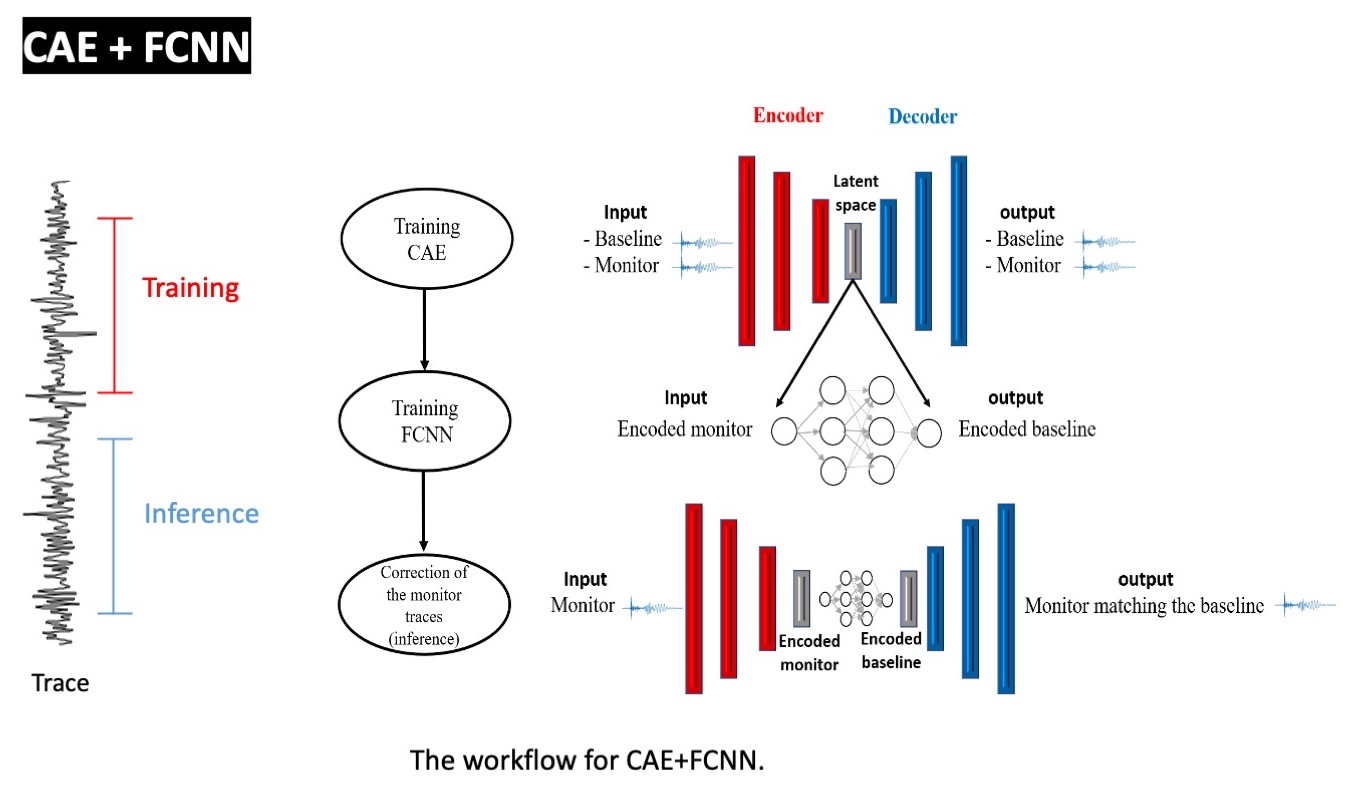
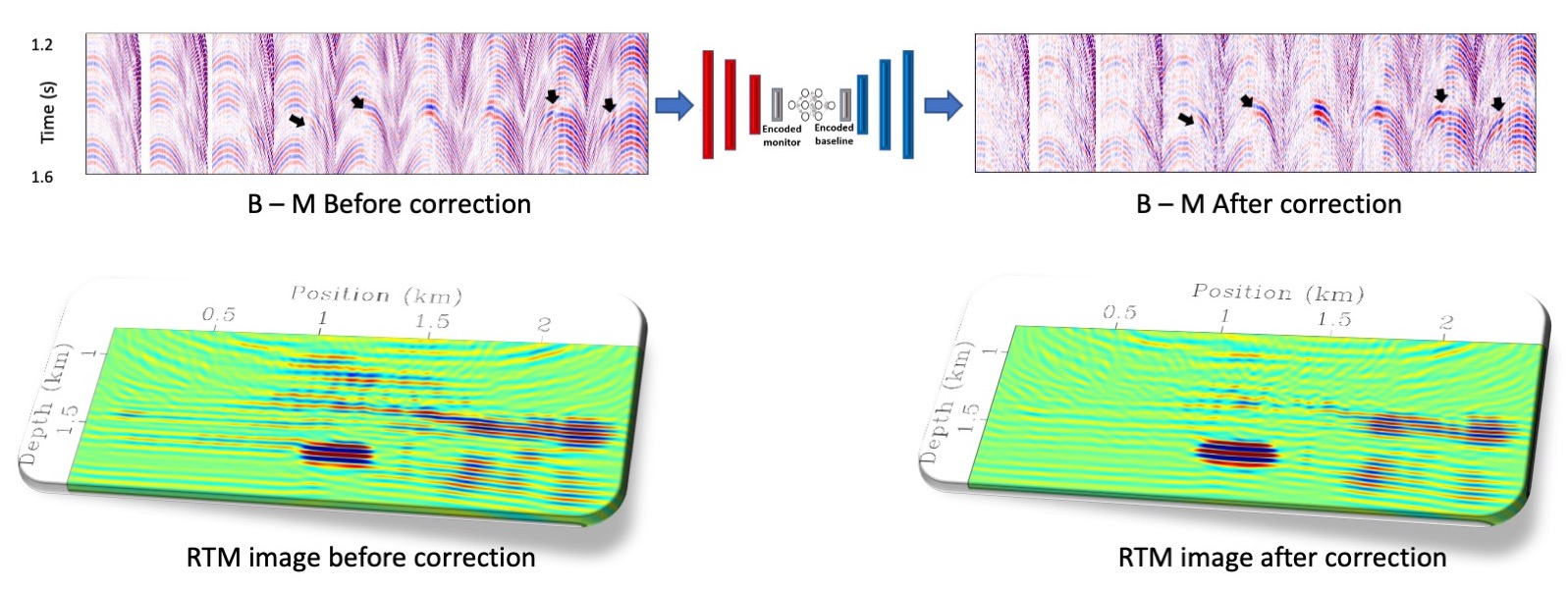
1- Convolutional Autoencoder (CAE) + Fully connected neural network (FCNN)
We train a convolutional autoencoder (CAE) and a fully connected neural network (FCNN), separately. The goal for the CAE is to learn a representation of the data in a reduced dimension since it is easier to match in a smaller space. The FCNN model is responsible to implement the matching between the monitor and the baseline.
2- Recurrent neural networks RNNs
References
Alali, A., Kazei V., Altaf B., Zhang X., and Alkhalifah T., (2020), "Time-lapse cross-equalization by deep learning", 82nd EAGE Conference and Exhibition 2020, European Association of Geoscientists & Engineers.
Alali, A., Kazei V., Sun B., Smith R., Nivlet P., Bakulin A., and Alkhalifah T., (2020), "Cross-equalization of time-lapse seismic data using recurrent neural networks", SEG Technical Program Expanded Abstracts 2020, Society of Exploration Geophysicists.
Alali, A., Kazei V., Altaf B., Zhang X., and Alkhalifah T., (2020), "Time-lapse cross-equalization by deep learning", 82nd EAGE Conference and Exhibition 2020, European Association of Geoscientists & Engineers.
Alali, A., Kazei V., Sun B., Smith R., Nivlet P., Bakulin A., and Alkhalifah T., (2020), "Cross-equalization of time-lapse seismic data using recurrent neural networks", SEG Technical Program Expanded Abstracts 2020, Society of Exploration Geophysicists.